[TOC]
一.数学理论#
clark变换#
1.将三相随时间变换的相位差为120°的电流波形变换为三个间隔120°的矢量。
2.利用三角函数对矢量进行降维,降维到两个坐标轴。(就是投影)
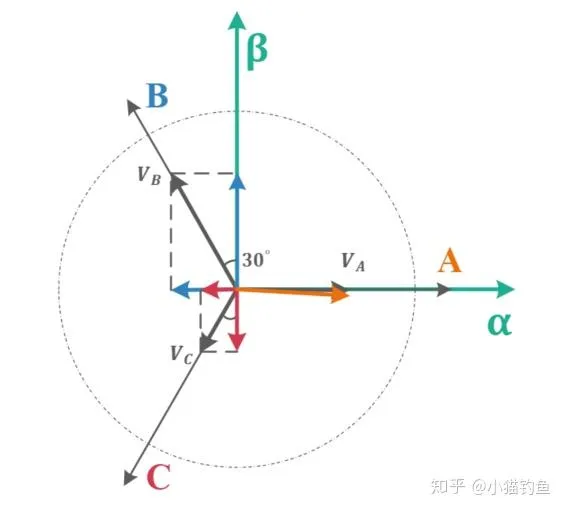
此为知乎大佬的图
这张图很清楚明显,根据我们的目的需要将abc三相电路投影到α与β所建立的直角坐标系上。
复杂的数学推理网上有很多讲得很好的资料和课程,我就偷懒直接上结果。
[IαIβ]=[10−2123−21−23]iaibic
当然这是变式中的一种
等幅值形式#
首先讲一下基尔霍夫电流定律(电路中任一个节点上,在任意时刻,流入节点的电流之和等于流出节点的电流之和)所以有:
简单说就是进去的水和出来的水是一样的
ia+ib+ic=0
根据这个定律可以通过一系列的数学变换发现,尽管矢量a与α轴重合,但是由于b,c相电流投影的存在,导致在a相输入1A电流,在α轴上的电流并不是等赋值的1A,而是-23,所以要乘上23得到:
[IαIβ]=32[10−2123−21−23]iaibic
然后根据上面公式的关系以及基尔霍夫电流定律可以求得:
Iα = ia
然后进一步基于 Iα = ia 与基尔霍夫电流定律可以求得Iβ:
Iβ=31×(2ib+ia)
总结:
{Iβ=iαIβ=31×(2ib+ia)
clark逆变换#
其实关于clark逆变换的作用就是 将降维后的形式重新升维变回原来的**i_a,i_b,$$i_c三相电流波形**。
将clark变换总结的公式可求得ib:
ib=23Iβ−Iα
根据基尔霍夫电流定律:ia+ib+ic=0得:
⎩⎨⎧ia=Iαib=23Iβ−Iαic=2−Iα−3Iβ
当然需要变换三次
Park变换#
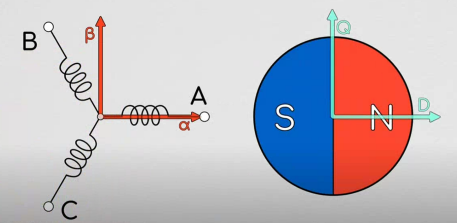
首先了解一下前提,因为电机转子不断旋转,所以带动α与β回不断旋转,所以此时创建应该坐标系,将它固定到转子,当转子不断移动时坐标系也在不断移动。
一个定制来描述无刷电机的旋转
将此图结合就是下面的图
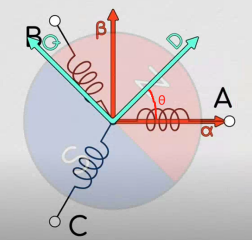
通过投影可以得到:
[idiq]=[cosθ−sinθsinθcosθ][iaib]
通过矩阵乘法取逆得:
[idiq]=[cosθ−sinθsinθcosθ]−1[iaib]
写为等式结果为:
{iα=idcosθ−iqsinθiβ=iqcosθ−+idsinθ
通过Iq,Id和电角度求得Iα和Iβ后,我们就可以通过前面提到的克拉克逆变换求得ia,ib,ic的波形,进而控制电机。
二、开环速度#
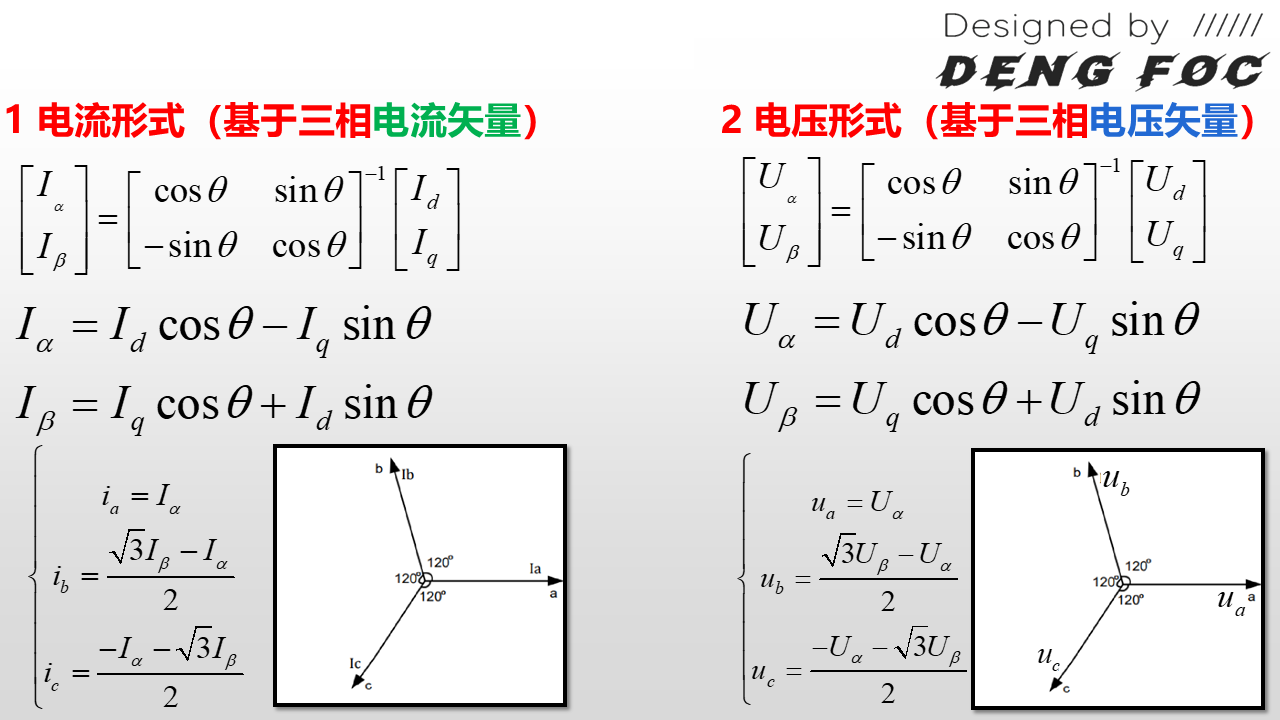
上面的数学理论主要讲解关于电流矢量,实际上电压矢量的推导过程是一致的。根据灯哥的视频里可以了解到这张图。